时间:2025-10-16 来源:FPGA_UCY 关于我们 0
帧差算法(Frame Difference Algorithm)是计算机视觉领域最基础的动态目标检测方法之一,其核心原理是通过比较连续视频帧之间的像素差异,提取运动目标的轮廓信息。相较于传统软件实现,FPGA(现场可编程门阵列)凭借其并行计算架构和硬件定制化能力,能够以极低的延迟(通常小于1ms)和功耗完成帧差运算,成为工业监控、自动驾驶、无人机避障等实时场景的首选方案。
1.1 算法原理与优化
帧差算法的数学本质可表示为:
D(x,y,t) = |I(x,y,t) - I(x,y,t-1)|
其中,( I(x,y,t) )为时刻( t )的像素值,( D(x,y,t) )为差分结果。实际应用中需结合阈值处理、形态学操作(如膨胀、腐蚀)和连通域分析,以消除噪声并提取完整目标。
FPGA优化关键点:
1.2 FPGA实现的优势二、11套工程源码:覆盖全场景的解决方案
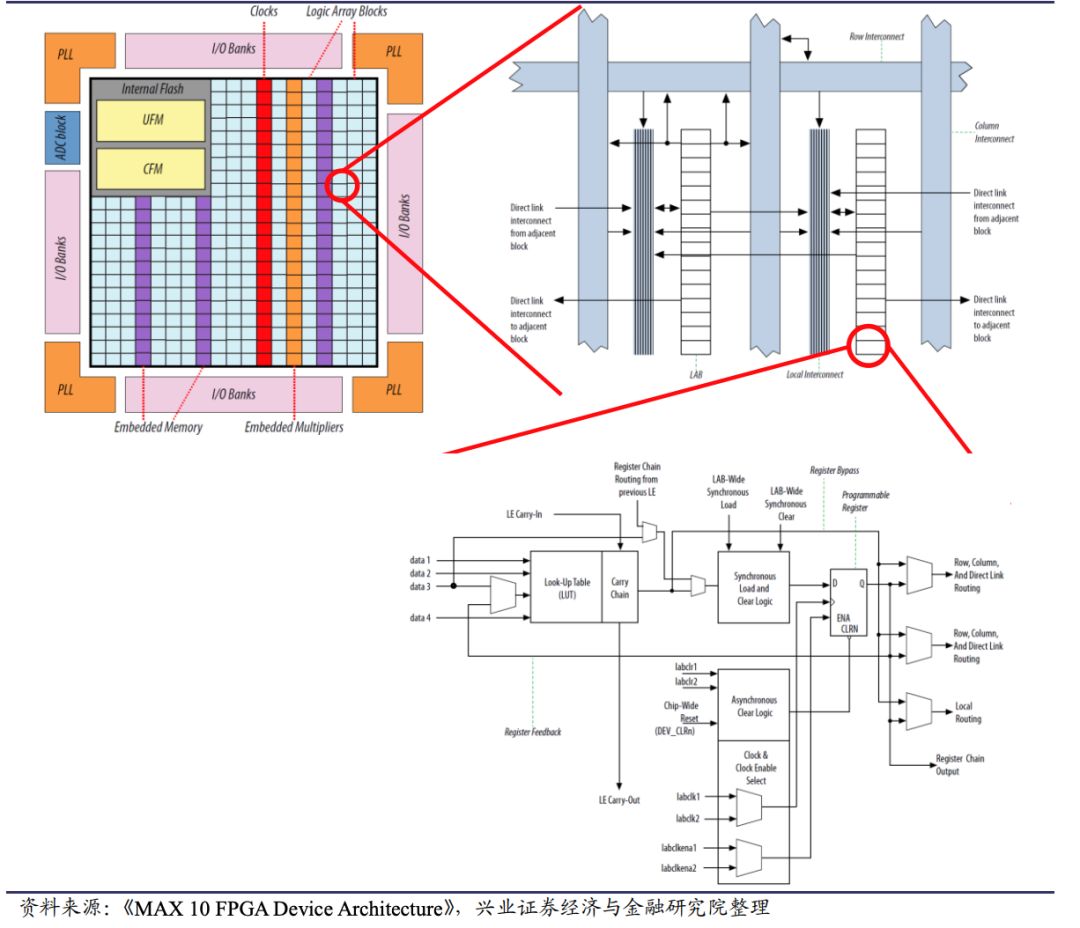
本次提供的11套工程源码覆盖了从基础帧差检测到复杂目标跟踪的全流程,均基于Xilinx Zynq系列或Intel Cyclone系列FPGA开发,支持HDMI/MIPI摄像头输入和VGA/HDMI输出。以下为典型工程示例:
2.1 基础帧差检测工程
功能:实现单目标运动检测,输出二值化差分图像。
关键模块:
2.2 多目标跟踪工程
功能:结合Kalman滤波和匈牙利算法,实现多目标轨迹预测与数据关联。
关键模块:
2.3 深度学习融合工程
功能:帧差算法预处理+轻量级CNN(如MobileNetV2)分类,提升复杂场景鲁棒性。
关键模块:
三、技术支持体系:从入门到精通3.1 开发环境配置指南3.2 典型问题解决方案3.3 性能调优建议四、应用场景与商业价值4.1 工业自动化4.2 智能交通4.3 机器人视觉五、开发者实践建议从简单工程入手:建议先部署基础帧差检测工程,验证摄像头接口和时序约束。逐步增加复杂度:在熟悉FPGA开发流程后,尝试融合跟踪算法或轻量级CNN。利用仿真工具:通过MATLAB/Python模型快速验证算法逻辑,减少硬件调试时间。参与社区交流:加入FPGA视觉处理技术论坛,分享调试经验与优化技巧。
本次提供的11套工程源码和技术支持,覆盖了FPGA帧差算法从理论到落地的全链条,无论是学术研究还是商业产品开发,均能提供强有力的技术支撑。通过硬件加速与算法优化的结合,开发者可轻松构建出超越传统方案的实时视觉处理系统。
上一篇:基于EDA技术的FPGA设计
下一篇:FPGA具体是指什么?